und
Bildübertragung
im
Internet
Software Kommunikation
![]()
![]()
![]()
![]()
![]()
![]()
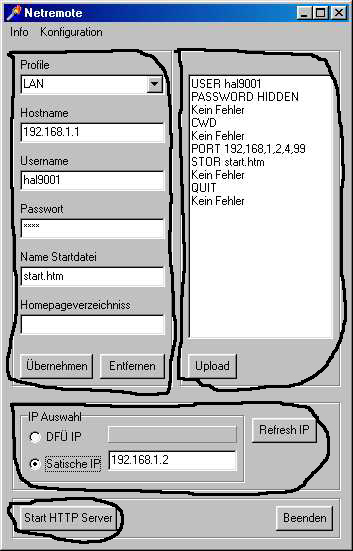
Die Software muss folgende Leistungsmerkmale beeinhalten:
-
Ermitteln der vom DHCP-Server des Providers vergebenen IP
-
Generieren einer HTML Seite mit Link auf ermittelte IP
-
FTP Upload der generierte Seite ins Homedirectoy des Providers
-
Empfangen der Steuerkommandos für den Motor
-
Steuerung des Motors
-
Senden der zum Projekt gehörenden HTML Seiten
Programmiert wurde auf Windows Platform mit Borland Delphi. Zum Einsatz
kamen die ICS
Winsock und Internetkomponenten von Francois Piette.
Diese Komponenten stellen eine sehr gute und zuverlässige Möglichkeit dar, die recht aufwendige
Programmierung mit dem Winsock-API zu realisieren.
In die Software wurde ein FTP-Client und ein HTTP-Server integriert. Der
FTP-Client übernimmt den FTP-Upload. Der HTTP-Server liefert die zum
Projekt gehörenden HTML-Seiten, empfängt die Steuerkommandos und gibt
diese an ein objektorientiert programmiertes Schrittmotormodul weiter.
Der HTTP-Server hat cgi-Funktionalität ohne direkt auf das cgi
zuzugreifen. Der Server wurde so programmiert, dass je nach gerichteter
Anfrage ein entsprechende Reaktion erfolgt. So wird das Steuern des Motors
aus der Webseite heraus durch Buttons ermöglicht. Den Buttons ist ein
Hyperlink unterlegt. Der Server wertet den empfangenen Request nach klicken
auf einen Button aus und übergibt die Daten an die
Motorsteuerung.
Klicken Sie für nähere Informationen auf die umrandeten Bereiche
Einige zusätzlichen Features:
- Autostartfähig. Nach Starten der Software kann Netremote den gesamten Prozess einleiten.
- Stufenlose Einstellung der Motordrehgeschwindigkeit
- Bedienung der Motorkamera auf eine User limitiert.
- Limitierung der maximalen Steuerzeit
- Ausbaufähigkeit. Es muss nicht unbedingt ein Motor gesteuert werden. Geringe Änderungen im Programmcode könnten auch Maschinen oder Automaten Fernbedienen lassen.
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()