Fernwirken
und
Bildübertragung
im
Internet
HARDWARE
![]()
![]()
![]()
![]()
![]()
![]()
Ansteuerung des Schrittmotors zur Kamerapositionierung
Zur Positionierung der Kamera kommt ein Schrittmotor aus Schulbeständen zum Einsatz. Es handelt sich um eine Unipolaren Motor Fuji Electrochemical SM 60.
-
Wicklungswiderstand 25 Ohm
-
Betriebsspannung max 30V
-
48 Schritte im Vollschrittbetrieb
-
Betriebsart: Vollschritt
Da die zu bewegende Last recht gering ist,
reicht ein Spannung von 12V..15V zum Betrieb aus.
Der Motor verfügt über vier Wicklungen welche in einer bestimmten
Reihenfolge geschaltet werden. Die Programmierung dieser Reihenfolge
erfolgt durch die Generierung bestimmter Bitmuster auf den Datenleitungen
der parallelen Schnittstelle.
Die Steuersignale des Motors werden über die parallele Schnittstelle des
Videoservers ausgegeben. Eine Leistungselektronik aus Schalttransistoren
schaltet dem ausgegebenen Bitmuster entsprechend die vier Wicklungen des
Motors.
Die Haltespannung des Motors wird im bewegungslosen Zustand herabgesetzt.
Die
Kamera ist somit gegen Erschütterungen stabilisiert. Des
weiteren werden die Wicklungen im Ruhezustand durch die fließenden Ströme
nicht belastet.
Schaltung
Klicken Sie auf die Bauteile um eine kurze
Erklärung zu erhalten
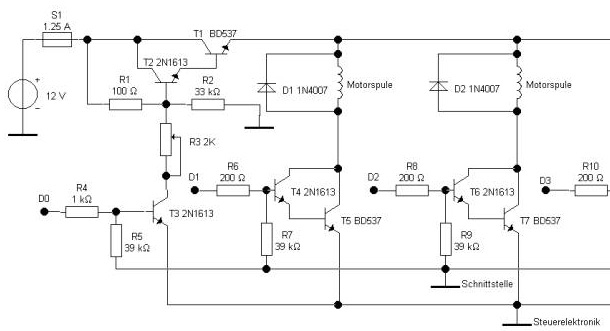
Darstellung der Schaltung für zwei von vier
Motorwicklungen
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()